Biography
I am a researcher in Azure AI Frameworks on rotation from Microsoft Research. Currently I am particularly interested in the intersection of reinforcement learning, and graph / kernel automatic scheduling for novel accelerators (GPUs, NPUs) and am exclusively focused on this topic.
Previously I was a researcher in the Machine Learning area at Microsoft Research, Redmond for 8 years.
I conduct not only fundamental research but also love to build high-quality software for e.g.,
- Archai a PyTorch-based Neural Architecture Search framework. Models produced by Archai are used by millions worldwide every day and handle billions of queries.
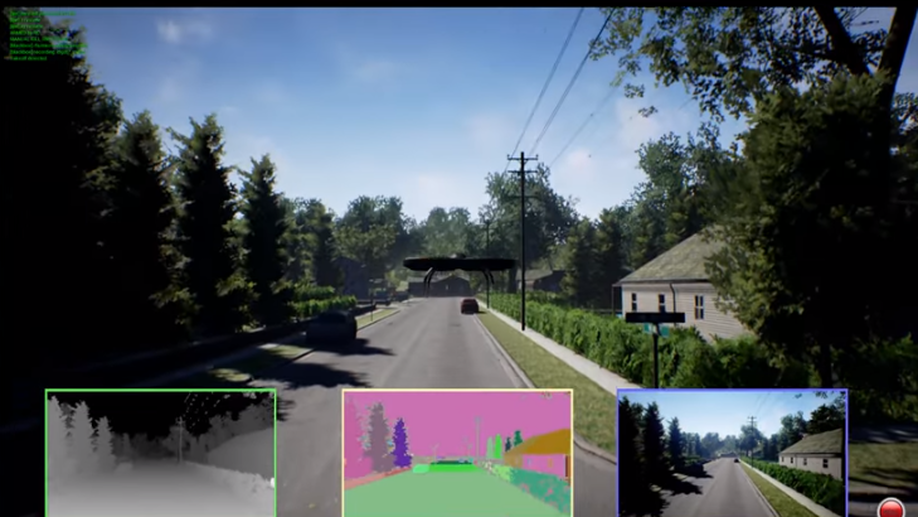
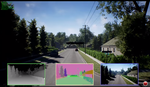
- AirSIM a photo-realistic simulator for robotics which is widely used by the community.
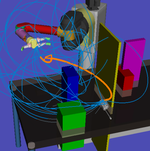
I finished my PhD at the Robotics Institute, Carnegie Mellon University. I do fundamental as well as applied research in machine learning, control and computer vision with applications to autonomous agents in general and robotics in particular. My interests include decison-making under uncertainty, reinforcement learning, artificial intelligence and machine learning. My work has been honored with Best Paper of the Year Shortlist at the International Journal of Robotics Research.
From 2015-2023 I used to regularly area-chair/review for NeurIPS, ICLR, ICML, AutoML. On occasion for ICRA, IROS, IJRR, JFR, CVPR, ECCV, ICCV, TMLR.
Interests
- Kernel and Graph Schedule Search
- Neural Architecture Search
- AutoML
- Reinforcement Learning
- Robotics
- Planning
- Vision
Education
-
PhD in Robotics, 2015
Carnegie Mellon University
-
MS in Robotics, 2012
Carnegie Mellon University
-
Bachelor of Electrical Engineering, 2007
Delhi College of Engineering